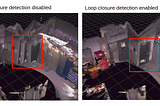
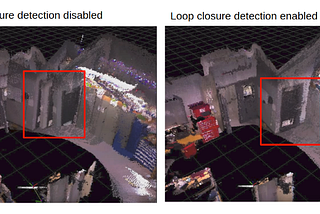
Shiva ChandracharyIntroduction to 3D SLAM with RTAB-MapRTAB-Mapping, short for Real-Time Appearance-Based Mapping, is a graph-based SLAM approach. Appearance-based SLAM means that the algorithm…8 min read·Jan 13, 2021--1--1
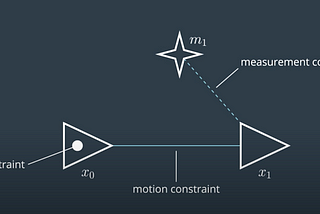
Shiva ChandracharyA brief introduction to GraphSLAMGraphSLAM is a SLAM algorithm that solves the full SLAM problem, i.e, the algorithm recovers the entier path and map instead of just the…10 min read·Jan 12, 2021--1--1
Shiva ChandracharyAn application of Numerical Solutions to Maximum Likelihood Estimation in GraphSLAMIn the previous post, we looked at a robot taking repeated measurements of the same feature in the environment. This example demonstrated…5 min read·Jan 11, 2021----
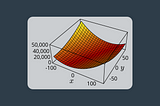
Shiva ChandracharyApplication of Maximum Likelihood Estimation in GraphSLAMAt the core of GraphSLAM is graph optimization — the process of minimizing the error present in all of the constraints in the graph. Let’s…6 min read·Jan 11, 2021--1--1